ASOS
National Program
The ASOS uses a variety of sensors to obtain a comprehensive and real time observation of the weather conditions a particular location. Standard ASOS sensor layout can be seen below:
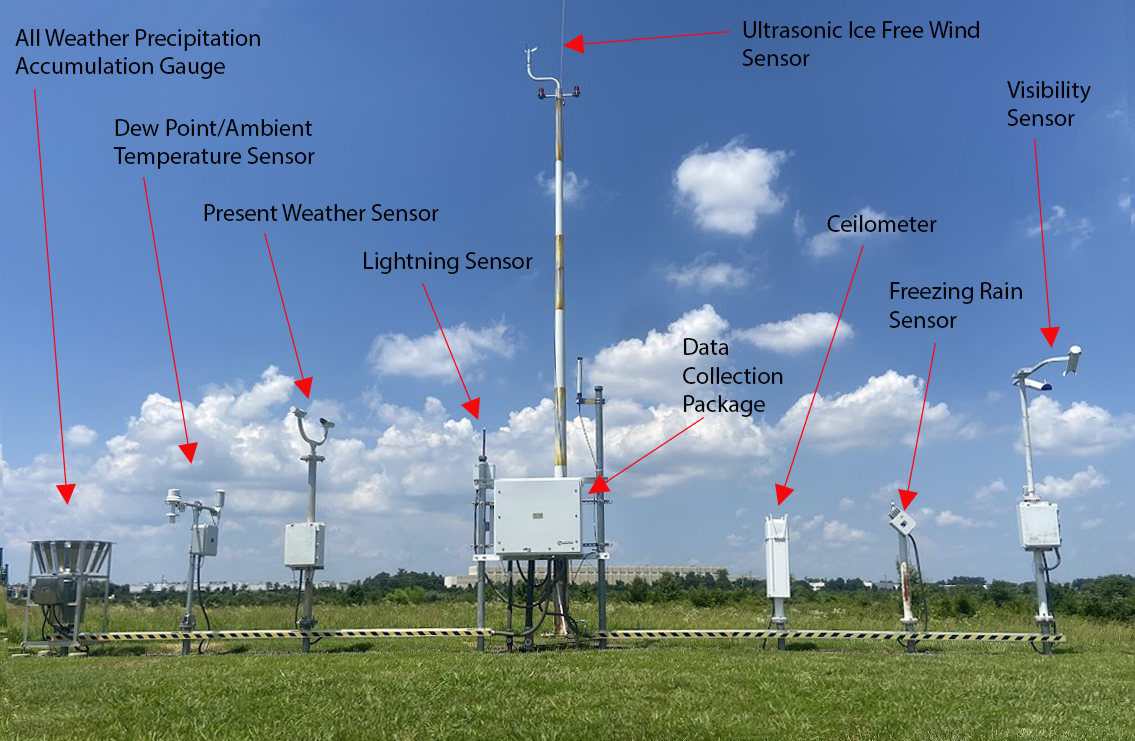
For further information on each individual component, please click on the links below:
* Not shown in image above
US Dept of Commerce
National Oceanic and Atmospheric Administration
National Weather Service
ASOS
1325 East West Highway
Silver Spring, MD 20910
Comments? Questions? Please Contact Us.

